Fitting to Future Observations
Posted on
This note is for Jiang, Y., & Liu, C. (2022). Estimation of Over-parameterized Models via Fitting to Future Observations (arXiv:2206.01824). arXiv.
sample $S={(x_i, y_i):i=1,\ldots,n}$ of measurements $(x, y)$ on each of $n$ items from a population $\bbP$ is modeled by
\[Y\mid x \sim \bbP_{x, \theta}^{(n)}, Y\in \bbY, x\in \IR^q\]with unknown parameter $\theta\in \IR^p$.
Also write
\[(X, Y)\sim \bbP_\theta^{(n)}, Y\in \cY, X\in \IR^q, \theta\in \IR^p\]where the distribution of $X$ is assumed to be independent of $\theta$
- $\ell(\theta\mid x, y)$: log-likelihood function of $\theta$, based on the model $\bbP_\theta^{(n)}$
- loss function: $L(\theta\mid x, y) = -\ell(\theta\mid x, y)$
Define the best model as $\bbP_{x,\theta}^{(n)}$ that minimizes the expected loss with respect to the population, that is, $\bbP_{x,\theta}$ with some $\theta$ in
\[\Theta_\star = \left\{\theta: E_{(X, Y)\sim \bbP}[L(\theta\mid X, Y)]=\min_{\tilde\theta} E_{(X, Y)\sim \bbP}[L(\tilde \theta\mid X, Y)]\right\}\]A modelling strategy is said to be valid iff \(\lim_{n\rightarrow\infty}\bbP_\theta^{(n)}=\bbP\) weakly for any $\theta\in \Theta_\star^{(n)}$ and some distance measure for probability distributions $\delta(\cdot,\cdot)$.
Consider two models $\bbP_{1,\theta}^{(n)}, \theta\in \Theta\subset \IR^{p_1}$, and $\bbP_{2,\xi}^{(n)}, \xi\in \Xi\subset \IR^{p_2}$, with bounded likelihood functions for a fixed sample size $n$ and some distance measure $\delta(\cdot,\cdot)$. Model 1 is said to be more efficient than Model 2 iff $E_{(X, Y)}\delta(\bbP_{1,\theta}^{(n)},\bbP)\le E_{X,Y}\delta(\bbP_{2,\xi}^{(n)},\bbP)$ for any $\theta \in \Theta_\star=\left\{\theta:E_{(X,Y)\sim \bbP}[L_1(\theta\mid X, Y)]=\min_{\tilde \theta}E_{(X,Y)\sim \bbP}[L_1(\tilde \theta\mid X, Y)]\right\}$ and $\xi \in \Xi_\star=\left\{\xi:E_{(X,Y)\sim \bbP}[L_2(\xi\mid X, Y)]=\min_{\tilde\xi}E_{(X,Y)\sim \bbP}[L_2(\tilde \xi\mid X, Y)]\right\}$, where $L_1$ and $L_2$ are the loss functions of model $\bbP_{1,\theta}^{(n)}$ and $\bbP_{2,\xi}^{(n)}$, respectively.
Different from Box’s “All models are wrong but some are useful”, the paper said “models, as simple-but-not-simpler approximations to $\bbP$, depend on the observed data and often change as more data are available.”
The definition of efficiency emphasises on the importance of modeling for future observations and suggests in auto-modeling with over-parameterized models, an imputation method be used to approximate the population.
An Imputation and Estimation Algorithm
Find an approximate solution to the desired optimization problem
\[\hat\theta = \arg\min_\theta E_{(X, Y)\sim \bbP} [L(\theta\mid X, Y)]\]by optimizing its sample counterpart, with a preference for simple models to control the deviation of the estimate of $\theta$,
\[G_{\hat \bbP}(\theta, \lambda) = E_{(X, Y)\sim \hat \bbP}[L(\theta\mid X, Y)]+\pi^{(n)}(\theta,\lambda) = \frac 1n \sum_{i=1}^n L(\theta\mid x_i, y_i) + \pi^{(n)}(\theta,\lambda)\,,\]where $\hat\bbP$ is the empirical distribution defined by the sample ${(x_i, y_i):i=1,\ldots,n}$.
Take a type of generalized $L_1$ penalty,
\[\pi_\lambda^{(n)}(\theta)=\sum_i\lambda_i\vert \theta_i\vert\,, \lambda_i\ge 0, i=1,\ldots,n\,.\]Write the target objective function,
\[E_{(X, Y)\sim \bbP}[L(\theta\mid X, Y)] = G_{\hat\bbP}(\theta,\lambda) + V_{\bbP,\hat \bbP}(\theta,\lambda)\]where
\[V_{\bbP,\hat\bbP}(\theta,\lambda) = E_{(X,Y)\sim \bbP}[L(\theta\mid X, Y)] - E_{(X, Y)\sim \hat\bbP}[L(\theta\mid X, Y)] - \pi^{(n)}(\theta,\lambda)\,.\]$G_{\hat \bbP}(\theta, \lambda)$ is minimized over $\theta$ at $\theta = \hat\theta$ for given $\lambda$, the remaining term $V_{\bbP,\hat\bbP}(\theta,\lambda)$ serves as a measure of validation.
Desire to choose $\lambda$ to minimize $E_{(X, Y)\sim \bbP}[L(\theta\mid X, Y)]$, then looks for a solution to have
\[\frac{\partial V_{\bbP,\hat \bbP}(\theta,\lambda)}{\partial \theta_i}=0\,.\]for all $i=1,\ldots, p$.
Consider a weaker alternative condition: $V_{\bbP,\hat\bbP}(\theta,\lambda)$ is required to be approximately a constant in a neighborhood of $\hat \theta$. (why?)
\[\hat \lambda_i = \min_{\lambda_i} \left\vert \frac{\partial V_{\bbP,\hat\bbP}(\theta,\lambda)}{\partial \theta_i} \right\vert\]for all $i=1,\ldots,p$.
is $\hat \lambda_i$ a function of $\theta_i$?
Create one future observation $(x, y)$
- take a bootstrap sample ${(\tilde x_i, \tilde y_i):i=1,\ldots, n}$. Denote by $\tilde \bbP$ the corresponding empirical distribution.
- find the bootstrap estimate $\tilde\theta$, that is, $\tilde\theta$ is obtained by minimizing $G_{\hat \bbP}(\theta,\lambda)$ over $\theta$ subject to
- draw $x$ from ${x_i:i=1,\ldots,n}$ at random and simulate $y$ from the fitted predictive model
Numerical Optimization Methods
Find a pair of solutions $\hat\theta$ and $\hat\lambda$ that minimize both $G_{\hat \bbP}(\theta,\lambda)$ and $V_{\bbP,\hat\bbP}(\theta,\lambda)$, as functions of $\theta$ (???), at $\theta=\hat\theta$ for some $\lambda=\hat\lambda$.
Method of Lagrange multipliers
\[\min_{\theta, \lambda} V_{\bbP,\hat\bbP}(\theta,\lambda)\]subject to the system of constraints $\partial G_{\hat\bbP}(\theta,\lambda)/\partial\theta=0$. The Lagrange function of $(\theta,\lambda,\phi)$ to be minimized becomes
\[g(\theta, \lambda,\phi) = V_{\bbP,\hat \bbP}(\theta,\lambda) + \phi'\frac{\partial G_{\hat \bbP}(\theta,\lambda)}{\partial \theta}\]Coordinate Descent Algorithm
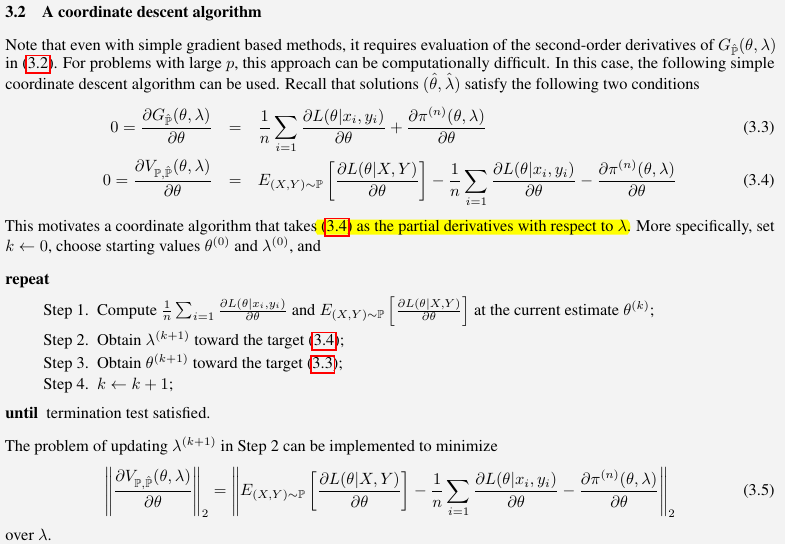
- Take another perspective of (3.3), it is just to minimize $G_{\hat\bbP}(\theta, \lambda)$. Thus, we can directly take advantage with existing nonlinear programming solvers, such as Ipopt (Interior Point Optimizer).
- For (3.4) and (3.5), since $\theta_2,\cdots,\theta_m\ge 0$, then
and hence
\[\frac{\partial \pi^{(n)}(\theta,\lambda)}{\partial \theta} = % \begin{bmatrix} % 0 \\ % \lambda_2\\ % \vdots\\ % \lambda_m\\ % 0\\ % \vdots\\ % 0 % \end{bmatrix} \begin{bmatrix} 0 & \lambda_2 & \lambda_3 & \cdots & \lambda_m & 0 & \cdots & 0 \end{bmatrix}^T\]Application: Many-Normal-Means
Make inference on the unknown means $\mu_1,\ldots, \mu_n$ from the sample $Y_1,\ldots, Y_n$ with the model $Y_i\mid {\mu_1,\ldots,\mu_n}\sim N(\mu_i,1),i=1,\ldots,n$, where $Y_1,\ldots,Y_n$ are independent of each other.
Re-formulate the problem: $Y_1,\ldots,Y_n$ is assumed to be a sample from a single population and view $\mu_1,\ldots,\mu_n$ as missing values taken from some unknown population. That is,
\[\mu_i\sim \bbP_\theta^{(n)}\qquad\text{and}\qquad Y_i\mid\mu_i\sim N(\mu_i,1)\]Take a simple discrete distribution at $m\ge n$ unknown points $\eta_1\le \eta_2\le\cdots\le \eta_m$ with the probability mass $\Pr(\mu = \eta_k) = \alpha_k, k=1,\ldots,m$. Then the observed-data likelihood based on $Y_i$ is given by $1/{\sqrt{2\pi}}\sum_{k=1}^m\alpha_k\exp(-\frac{(Y_i-\eta_k)^2}{2})$
Auto-modeling framework is used for fitting the discrete distribution model $\bbP_\theta^{(n)}$, which provides an approximation to the true distribution.
For simplicity-preference function, write $\theta_1=\eta_1, \theta_k=\eta_k-\eta_{k-1}$ for $k=2,\ldots,m$ and $\theta_{m+k}=\alpha_k$ for $k=1,\ldots,m$. Take the $L_1$ penalty on $(\theta_2,\ldots,\theta_m)’\in \IR^{m-1}$, that is $\pi_\lambda^{(n)}(\theta) = \sum_{k=2}^m\lambda_k\vert \theta_k\vert$, where $\lambda_k\ge 0$ and $k=2,\ldots, m$.
\[\begin{align*} L_i \triangleq L(\theta\mid y_i) &= -\log \sum_{k=1}^m \alpha_k \exp\left(-\frac{(y_i-\eta_k)^2}{2}\right)\\ &= -\log \sum_{k=1}^m \theta_{m+k} \exp\left(-\frac{(y_i-\sum_{j=1}^k\theta_j)^2}{2}\right)\,, \end{align*}\]then
\[\frac{\partial L_i}{\partial \theta_\ell} = \begin{cases} -\frac{\sum_{k=\ell}^m\theta_{m+k}\exp\left(-\frac{(y_i-\sum_1^k\theta_j)^2}{2}\right)(y_i-\sum_1^k\theta_j)}{\sum_{k=1}^m\theta_{m+k}\exp\left(-\frac{(y_i-\sum_1^k\theta_j)^2}{2}\right)} & \ell\le m\\ -\frac{\exp\left(-\frac{(y_i-\sum_1^{\ell-m}\theta_j)^2}{2}\right)}{\sum_{k=1}^{m}\theta_{m+k}\exp\left(-\frac{(y_i-\sum_1^k\theta_j)^2}{2}\right)}& \ell\ge m+1 \end{cases}\]Alternatively, we can use finite difference to approximate the derivatives, such as the JuliaDiff/FiniteDifferences.jl package in Julia, but attention that forward_fdm might be needed due to singularity issue of log function.
-
MLE: $\hat\mu^{MLE}_i=y_i$.
-
James-Stein Estimator:
which shrinks the MLE of each $\mu$ towards the overall sample mean of the observed data.
- g-modeling: According to Narasimhan and Efron (2020), Empirical Bayes inference assumes an unknown prior density $g(\theta)$ has yield (unobservable) $\Theta_1,\ldots,\Theta_N$, and each $\Theta_i$ produces an independent observation $X_i$ from $p_i(X_i\mid \Theta_i)$. The marginal density $f_i(X_i)$ is a convolution of the prior $g$ and $p_i$. The Bayes deconvolution problem is to recover $g$ from the data. Generally, the estimation of $g$, so-called g-modeling, is difficult, but Narasimhan and Efron (2020) proposed to restrict the prior $g$ to lie within a parametric family of distributions and claimed that the results are more encouraging. Their R package deconvolveR is available on CRAN.
For the many normal means example, just call
result <- deconv(tau = tau, X = x, deltaAt = 0, family = "Normal")
where x is the observed data, and tau is a vector of discrete support points for $\theta$.
For simplicity, I skip the step of approximation of $\bbP$ by bootstrap samples, and instead directly use the true $\bbP$. My results are as follows,
julia> @time many_normal_means(n=10,K=200,case=1)
409.362780 seconds (3.79 G allocations: 408.156 GiB, 13.74% gc time)
1×4 Matrix{Float64}:
0.951092 0.297215 0.18758 0.174413
julia> @time many_normal_means(n=10,K=200,case=2)
1166.330146 seconds (10.30 G allocations: 1.085 TiB, 14.45% gc time)
1×4 Matrix{Float64}:
1.05033 0.948022 0.849796 0.684122
julia> @time many_normal_means(n=10,K=200,case=3)
873.212648 seconds (7.60 G allocations: 818.290 GiB, 14.50% gc time, 1.37% compilation time)
1×4 Matrix{Float64}:
1.01645 0.565332 0.428163 0.438326
julia> @time many_normal_means(n=20,K=200,case=1)
1506.267866 seconds (11.68 G allocations: 1.780 TiB, 14.42% gc time)
1×4 Matrix{Float64}:
1.0176 0.151387 0.0856947 0.107758
julia> @time many_normal_means(n=20,K=200,case=2)
5058.591486 seconds (38.67 G allocations: 5.893 TiB, 13.97% gc time, 0.00% compilation time)
1×4 Matrix{Float64}:
0.994893 0.85625 0.764716 0.488117
julia> @time many_normal_means(n=20,K=200, case=3)
4469.796364 seconds (32.48 G allocations: 4.950 TiB, 14.42% gc time)
1×4 Matrix{Float64}:
1.05389 0.511735 0.323881 0.460926
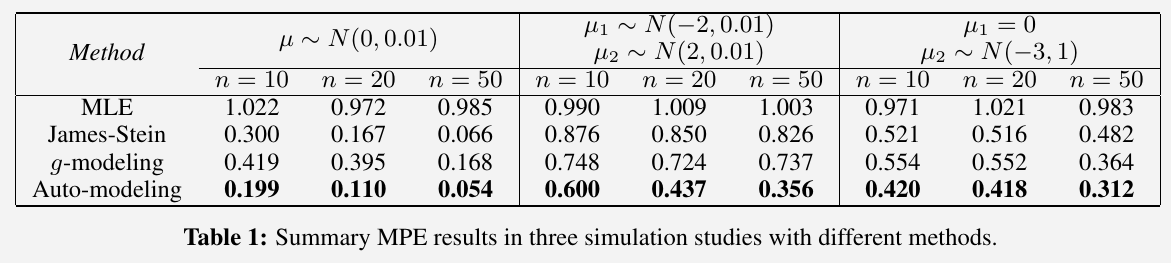
We observe that
- Except the results of g-modeling, others are close to the reported results in the paper.
- Sometimes g-modeling can outperform auto-modeling, but I did not deliberately select its parameters. The paper also did not discuss how they choose the parameters for this method.
- Currently the program is quite slow, and the computational burden is mainly Step 3 in the coordinate descent algorithm. Is there any speed-up strategies?